LiDAR क्या है?
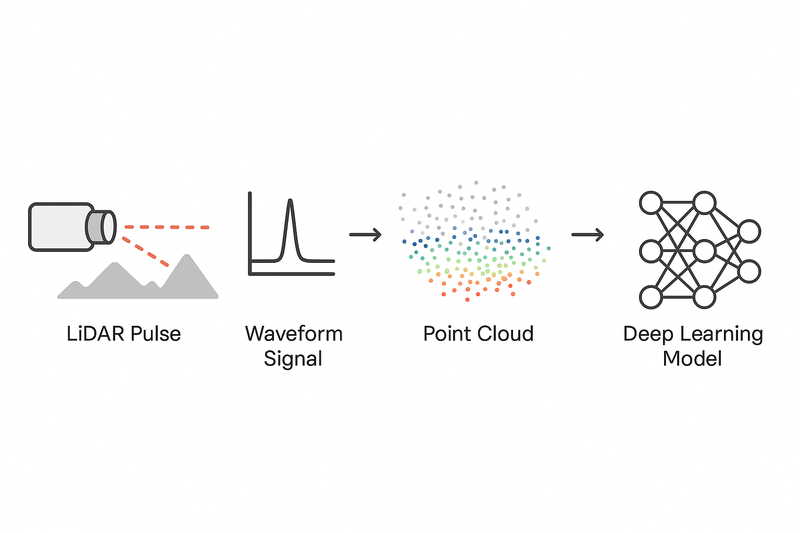
LiDAR (लाइट डिटेक्शन एंड रेंजिंग) लेजर पल्स उत्सर्जित करके और उनके प्रतिबिंबों का विश्लेषण करके दूरियां मापता है। प्रत्येक पल्स प्रदान करता है:
- श्रेणी - उड़ान के समय से दूरी
- तीव्रता - सतह की परावर्तनशीलता
- कोण - लेजर बीम की दिशा
इनमें से लाखों रिटर्न बनाते हैं पॉइंट क्लाउड - निर्देशांक (x, y, z) और अतिरिक्त विशेषताओं वाला एक 3D मानचित्र।
[यदि एमएसओ और !supportInlineShapes और supportFields]><span style='mso-element:field-begin;mso-field-lock:yes'></span><span style='mso-spacerun:yes'></span>SHAPE <span style='mso-spacerun:yes'></span>\* MERGEFORMAT <span style='mso-element:field-separator'></span><![endif] [यदि जीटीई वीएमएल 1]><v:shapetype id='_x0000_t75' coordsize='21600,21600' o:spt='75' o:preferrelative='t' path='m@4@5l@4@11@9@11@9@5xe' भरा हुआ = "एफ" स्ट्रोक किया गया = "एफ"> <v:स्ट्रोक जॉइनस्टाइल='मिटर'/> <v:सूत्र> <v:f eqn='यदि लाइनड्रॉ पिक्सेललाइनविड्थ 0'/> <v:f eqn='sum @0 1 0'/> <v:f eqn='योग 0 0 @1'/> <v:f eqn='prod @2 1 2'/> <v:f eqn='prod @3 21600 पिक्सेलविड्थ'/> <v:f eqn='prod @3 21600 पिक्सेलहाइट'/> <v:f eqn='sum @0 0 1'/> <v:f eqn='prod@6 1 2'/> <v:f eqn='prod @7 21600 पिक्सेलविड्थ'/> <v:f eqn='योग @8 21600 0'/> <v:f eqn='prod @7 21600 पिक्सेलहाइट'/> <v:f eqn='योग@10 21600 0'/> </v:सूत्र> <v:path o:extrusionok='f' gradientshapeok='t' o:connecttype='rect'/> <o:lock v:ext='संपादित करें' पहलू अनुपात='t'/> </v:shapetype><![endif] [यदि एमएसओ और !supportInlineShapes और supportFields]><v:आकार id='_x0000_i1025' type='#_x0000_t75' style='width:300pt;height:200.4pt'> <v:इमेजडेटा क्रॉपटॉप='-65520f' क्रॉपबॉटम='65520f'/> </v:shape><span style='mso-element:field-end'></span><![endif]
डेटा प्रारूप
विवेकपूर्ण रिटर्न: सबसे आम प्रारूप खराबी कुंजी सतह हिट
[x, y, z, तीव्रता, रिटर्न_नंबर, टाइमस्टैम्प, रिंग_आईडी]
भंडारण प्रारूप
- .LAS/.LAZ (भू-स्थानिक)
- .पीसीडी (रोबोटिक्स)
- .BIN (स्वायत्त ड्राइविंग डेटासेट)
गहन शिक्षण अनुप्रयोग
1. बिंदु-आधारित नेटवर्क
- प्वाइंटनेट/प्वाइंटनेट++ - प्रक्रिया कच्चे बिंदु सीधे समन्वय करती है
- वस्तु वर्गीकरण और विभाजन के लिए उपयोग किया जाता है
2. वोक्सेल-आधारित नेटवर्क
- वोक्सेलनेट/सेकंड - बिंदुओं को 3डी ग्रिड में बदलें, 3डी सीएनएन लागू करें
- स्वायत्त वाहनों में 3डी ऑब्जेक्ट डिटेक्शन के लिए उपयोग किया जाता है
3. रेंज/बीईवी अनुमान
- LiDAR को 2D छवियों या विहंगम दृश्य ग्रिड पर प्रोजेक्ट करें
- कुशल 2डी सीएनएन प्रोसेसिंग सक्षम करें
4. मल्टीमॉडल फ्यूजन
- कैमरा RGB डेटा के साथ LiDAR ज्यामिति को संयोजित करें
- स्वायत्त ड्राइविंग में उपयोग किया जाता है (टेस्ला एफएसडी, वेमो)
5. सिग्नल लेवल प्रोसेसिंग
- तंत्रिका नेटवर्क को सीधे कच्चे तरंग संकेतों पर लागू करें
- बिंदु बादलों की तुलना में अधिक भौतिक विवरण सुरक्षित रखता है
निष्कर्ष
LiDAR सिग्नल आधुनिक 3D धारणा प्रणालियों की रीढ़ हैं। गहन शिक्षण इन संकेतों को सरल दूरी माप से समृद्ध अर्थ संबंधी समझ में बदल देता है, जिससे मशीनें बढ़ती सटीकता और बुद्धिमत्ता के साथ 3डी दुनिया को समझने और नेविगेट करने में सक्षम हो जाती हैं।

Comments 0
Please sign in to leave a comment.
No comments yet. Be the first to share your thoughts!